すらりん日記は、サークル名「すらりんラボ」として、技術書典12(オンライン) に参加します。今回のすらりんラボでは、新刊3冊を出します。技術書典13は 9/10 (土曜) から 9/25 (日曜) まで、オンラインイベントで開催されます。そのなかで、 9/11 (日) はオフライン会場でイベントが開催されます。
頒布情報
- 日時: 2022/9/10 から 2022/9/25
- 場所:
- 技術書典オンラインマーケット
- 池袋サンシャインシティ 展示ホールD(文化会館ビル2F)(9/11のみ
- 頒布物:
- 【新刊】DirectX12 Programming Vol.4
- 【新刊】Vulkan Programming Vol.4
- 【新刊】1週間で作る自律走行 AI ロボット
~JetBot による実体験でディープラーニングの基本がわかる - Vulkan Raytracing Programming Vol.1
- DirectX Raytracing Programming Vol.1
続いて、技術書典13に向けて用意している新刊の内容を紹介します。
DirectX12 Programming Vol.4
DirectX12 のプログラミング書籍 第4巻です。
今回は、法線マッピングに関するものやディファードレンダリング、GPU パーティクル、VAT、動画テクスチャや Waitable Swapchain など、API そのものの使い方よりはユースケースに近いものを取り扱っています。
目次
- はじめに
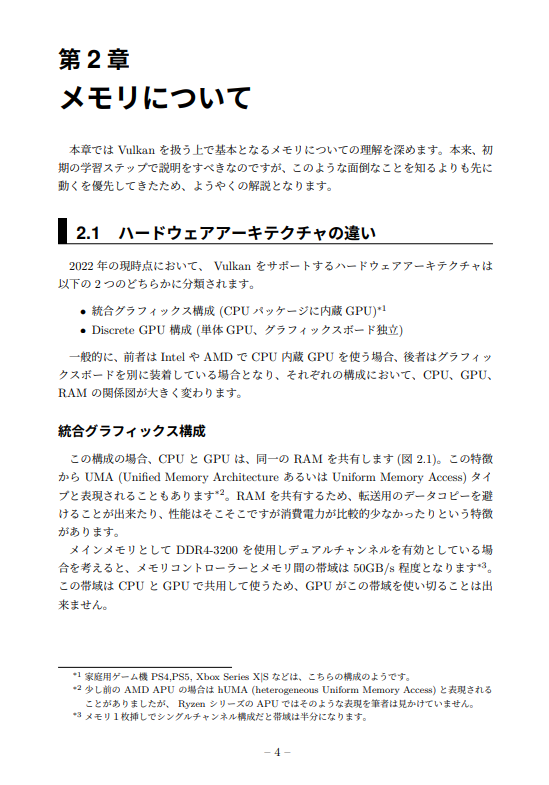
- メモリについて
- 頂点のストリームアウト
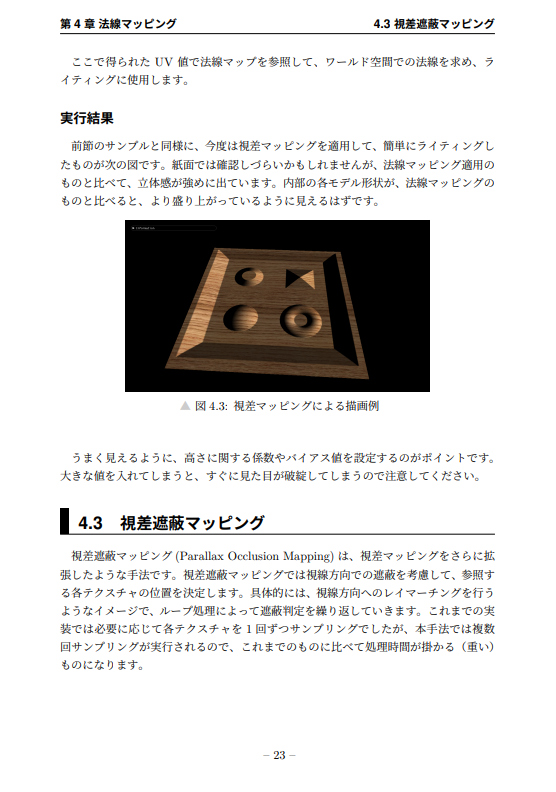
- 法線マッピング
- ディファードレンダリング
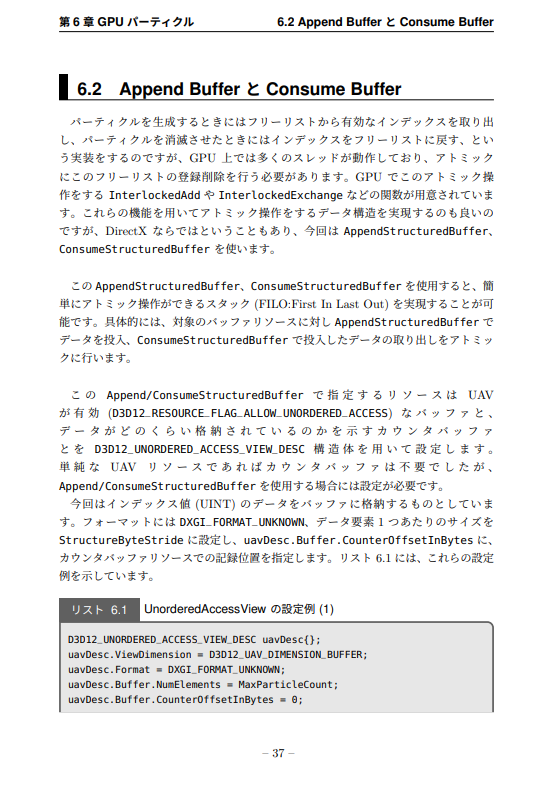
- GPUパーティクル
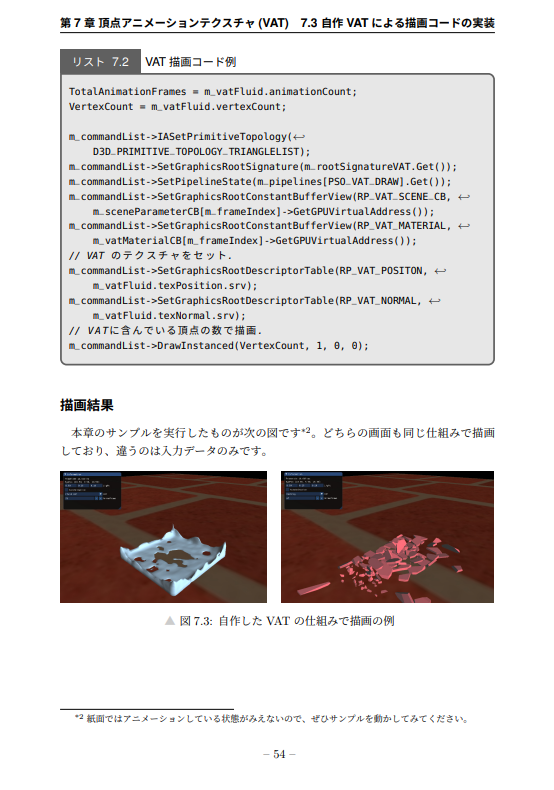
- 頂点アニメーションテクスチャ (VAT)
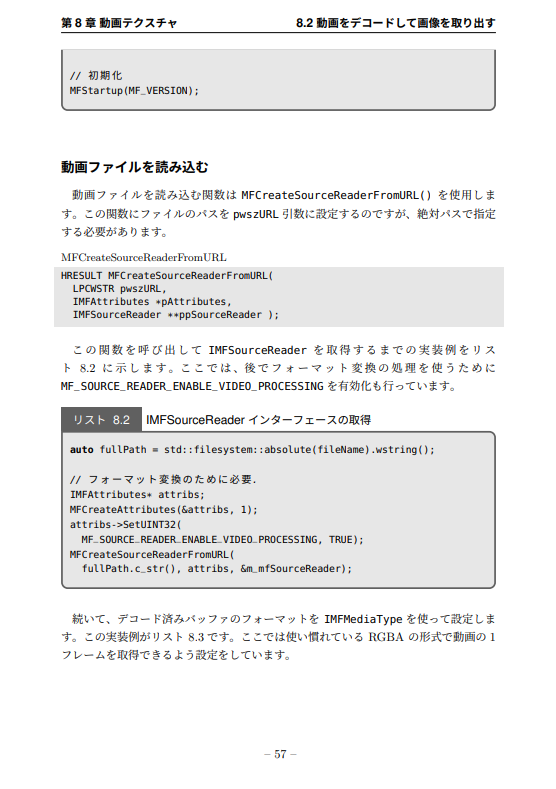
- 動画テクスチャ
- Waitable Swapchain
- あとがき
サンプル


※ 本ページ末尾にプログラム実行例を紹介しています。
購入先
技術書典オンラインマーケット: https://techbookfest.org/product/gf0CZmD3wFRerHuaVcW773
BOOTH: https://slash-labo.booth.pm/items/4138121
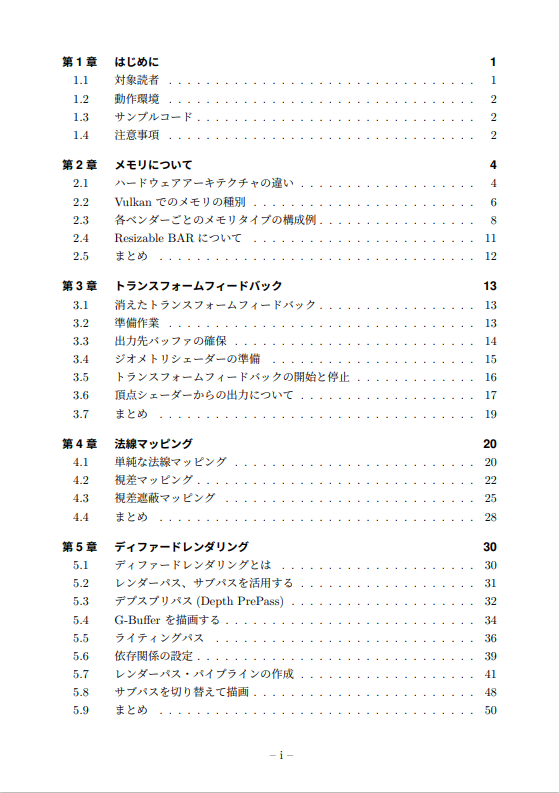
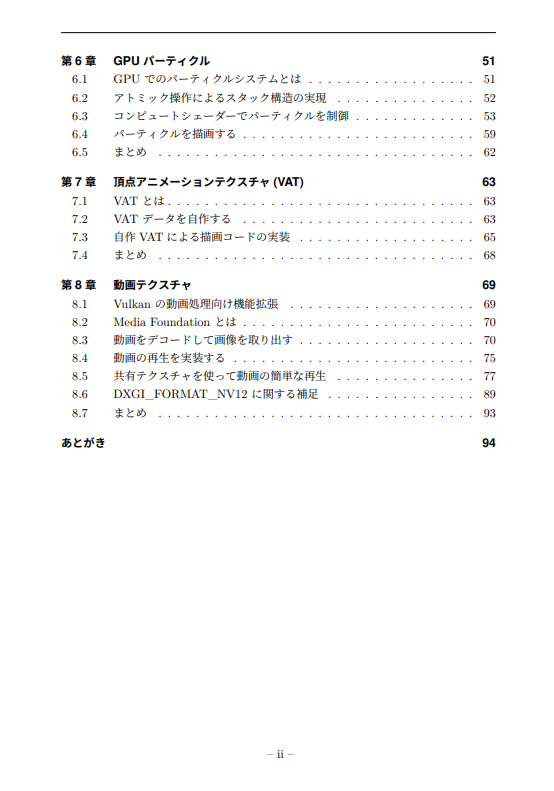
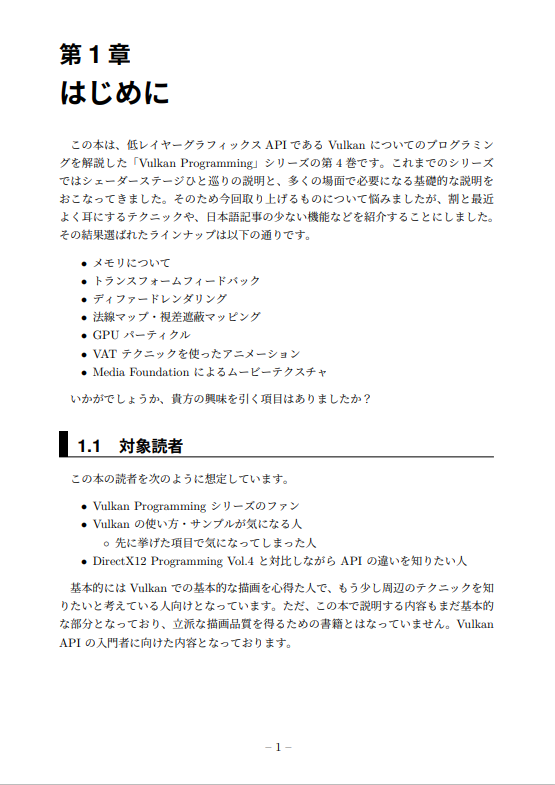
Vulkan Programming Vol.4
Vulkan のプログラミング書籍 第4巻です。
今回は、法線マッピングに関するものやディファードレンダリング、GPU パーティクル、VAT、動画テクスチャなど、API そのものの使い方よりはユースケースに近いものを取り扱っています。
ディファードレンダリングの章ではサブパスを用いたものを紹介し、 ComputeShader の登場により忘れ去られてしまったトランスフォームフィードバックについても、記載をしています。
目次
- はじめに
- メモリについて
- 頂点のストリームアウト
- 法線マッピング
- ディファードレンダリング
- GPUパーティクル
- 頂点アニメーションテクスチャ (VAT)
- 動画テクスチャ
- あとがき
サンプル

※ 本ページ末尾にプログラム実行例を紹介しています。
購入先
技術書典オンラインマーケット: https://techbookfest.org/product/aTQwGaX2EcPpwyvg69dszw
BOOTH: https://slash-labo.booth.pm/items/4138122
1週間で作る自律走行 AI ロボット
Jetson Nano という小さなコンピュータボードを用いて、自律走行するロボット(車)を作成します。
詳しくはこちらのページを参考にしてください。
目次
・はじめに
・第1章 JetBot を作る
JetBot はオープンソースなロボット
構成部品
組み立てる
OS の書き込み
システム設定
JetBot用に構成
・第2章 ディープラーニングの概要
AI、機械学習、ディープラーニング
機械学習
ディープラーニング
機械学習の作業ステップ
・第3章 障害物を避ける
概要
データの収集
データから学習させる
自律走行をテスト
突然出現する障害物
動作の背後にあるもの
・第4章 Windows を用いた高速な機械学習環境のセットアップ
CUDA / PyTorch を利用可能な環境を作る
学習させるには
・第5章 ライントレース
データの収集
データから学習させる
自律走行をテスト
動作の背後にあるもの
・付録 Raspberry Pi でチャレンジ
購入先
BOOTH: https://slash-labo.booth.pm/items/4138935